examples and animations |
PhysX Glue TestPath: Particle View > Click or add a PhysX Glue test. The PhysX Glue test creates bindings between particles, thus serving as a "glue" for particle matter. With PhysX Glue, particles tend to stay together in their original formation, but can break apart during the simulation based on physical actions or the influence of the PhysX Solvent operator. Like many other tests in Particle Flow, you can use PhysX Glue without necessarily connecting it to another event, in which case it functions as an operator. PhysX Glue provides two basic ways to bind particles: flexible and rigid. Rigid mode (Binding type=Rigid or Simplified) firmly maintains the positions of particles relative to each other, while in flexible mode (Binding type=Distance), particles have more freedom to move around each other. See also: Important Glue Points PhysX Glue is one of the most important and complex elements of Box#2, so it's important to be aware of how the various factors work together, both within Glue and with the rest of the system. As you work with PhysX Glue, keep these considerations in mind:
Interface Note: Because the PhysX Glue Test > Parameters rollout is quite long, we've broken it up into several sections for documentation purposes. Binding groupType - Defines the major classes of bindings used by a PhysX Glue operator. The available choices are Distance, Rigid, and Simplified. Each type has its own rollout with additional parameters relevant to that binding type.
Timing - Defines when new bindings are formed.
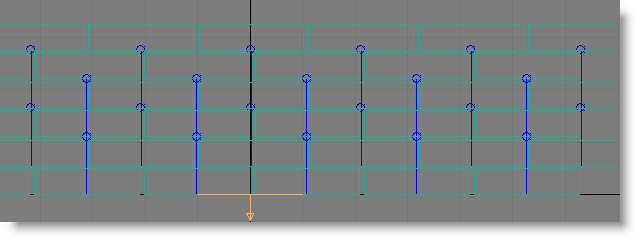
Bind Distance - The distance from a particle within which PhysX Glue checks for other particles that can be bound to it. During the first stage of generating bindings-finding candidates for binding-the number of the potential binding-partner particles cannot exceed the Max Binds p/Particle value, and might be even less if a particle already has bindings that were generated before the current frame. When considering a binding to the ground or a deflector, the distance is measured from the particle's center to the closest point on the surface of the ground or a deflector. Tip: When adjusting Bind Distance, Bind Gap, and Bind Center Aligned Only, it's often helpful to turn on the Visualize Binding option (see following). When Visualize Binding is on, bindings are depicted as lines and other symbols, using the color of the swatch next to the Visualize Binding check box, as shown in the following illustrations. In the following illustration, a wall of bricks uses a low Bind Distance value, so the bindings are relatively unstable:
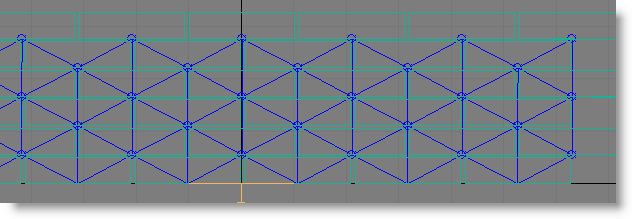
By increasing the Bind Distance value, you get diagonal bindings as well as vertical ones, improving the stability of the structure:
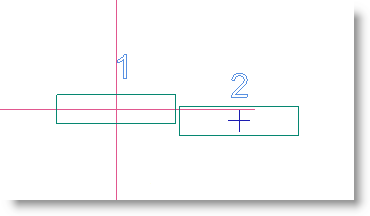
Bind Gap - The second, optional stage of generating bindings takes into account particle orientations and collision shapes (as opposed to rendered shapes). When Bind Gap is on, then, in order to be bound, the distance between particle shapes must be less than the Bind Gap value. Because this option deals with particle shapes, simulation can be slow if particles have complex collision shapes such as Convex Hull. For an example of usage of Bind Gap, see the tutorial at the start of this manual, which uses Bind Gap in conjunction with Bind Center Aligned Only (see following) to allow particles to bind in the horizontal direction only. Bind Center Aligned Only - When on, binding occurs only between particles that are aligned to each other. For each pair of particles (say, Particle A and Particle B), the software determines alignment by drawing an imaginary line from Particle A's pivot to the closest point on an extrapolated extension of Particle B's local axis that comes nearest to Particle A's pivot, and then reverses the process using Particle B's pivot and Particle A's local axes. If the length of neither imaginary line in world units does not exceed the Align Margin value, PhysX Glue considers the particles to be aligned, and binds only those particles. The following illustration shows an example of how Bind Center Aligned Only works. It depicts two brick-type particles: 1 and 2. The red cross shows brick 1's local axes, extended to pass by brick 2's pivot, shown as a smaller blue cross. If the distance between brick 2's pivot and the closest point on the nearest extended axis of brick 1 is equal to or less than the Align Margin distance, then PhysX Glue considers their centers to be aligned for binding purposes.
Allow Binding Penetration - Defines whether bound-together particles can interpenetrate. When on, the simulation engine allows the particle shapes to overlap. When off, the particles cannot overlap; instead, they collide. The same applies to a particle bound to a deflector or the ground. Max Binds p/Particle - The greatest number of binding candidates that the software considers for each particle, within the Bind Distance. This can affect the particle arrangement after binding; you might want to experiment with it to find the best value for your simulation. When To Bind With group > Deflectors and/or Ground binding options are on (see following), this limit is ignored in defining whether a particle can be bound to a deflector and/or the ground. In this sense, bindings to deflectors and the ground have a higher priority than regular particle bindings. However, if a particle binds to a deflector and/or the ground, these "VIP" bindings are counted as a part of the total number of bindings for a particle, so it can restrict the number of particles a particle can bind to. Tip: Allowing a large number of bindings for a particle makes the simulation more complex and potentially unstable because more counter-forces are applied to a particle. For optimal stability and accuracy in simulations that use bindings, it's recommended that you increase the Subframe Factor setting in PhysX World helper. A good general formula is [Subframe Factor] = 2 * [Max Binds p/Particle] + 2. So if Max Binds p/Particle is set to 4, then set Subframe Factor to 10 (2*4 + 2). Visualize Binding - When on, bindings appear in the viewports as lines between bound entities using the specified color; to change the color, click the color swatch. To best see the links, set the viewport to Wireframe display, if necessary, or even Bounding Box. Visualize Binding is useful as a debugging tool when you want to see the results of the PhysX Glue test settings: which particles are bound to which. The status of the check box does not affect the simulation itself, but it can slow down the playback. The option is relevant only for viewports; it does not affect the rendered output. Flexible and rigid bindings are displayed differently. Rigid bindings connect particle positions with a line segment, placing a circle marker at a particle position. If a particle and a deflector or ground are bound by a rigid binding, a line segment is drawn between the particle position and closest deflector/ground surface point. Each flexible binding is drawn as a line between anchor binding points, with square markers at the anchor positions. More information about anchor points is found in the following two topics, which cover the binding-type-specific rollouts: PhysX Glue Test: Distance Binding Rollout and PhysX Glue Test: Rigid/Simplified Binding Rollouts. Tip: You can toggle the visibility of all bindings associated with a particular PhysX World helper with the Hide Visual Representation > Particle Bindings setting on the helper's Parameters rollout (at the bottom of the rollout). Tip: Visible bindings do not render, but you can make them show up in animation previews (Animation menu > Make Preview) by turning on Make Preview dialog > Display In Preview group > Helpers. Bake Binding/Unbake/? - Generation of bindings is a CPU-intensive process-the test has to check for bindings among all particles in the event to find those that satisfy the specified conditions. To avoid having to repeat these calculations every time you run the simulation, you can precalculate and save binding information by clicking Bake Binding. PhysX Glue makes a record of all bindings in the current frame, and uses this information subsequently in determining whether to bind a pair of particles when they enter the event. After you bake the bindings, most parameters in the Binding group become unavailable because they no longer define binding conditions; the binding conditions are defined by the baked data. The one exception is Max Binds p/Particle, which remains available after baking, so you can reduce (but not increase) the maximum number of binds per particle in the baked solution. To delete the baked data, click Unbake, and to view the recorded binding statistics, click the ? button. The binding record is saved with the scene file, which typically results in larger files, and the next time you load the file, the binding record is again used as a binding guide. | |||||||||||||||
|
|
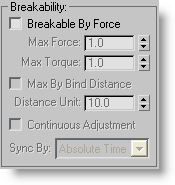
Breakability groupSimply binding particles together is usually not enough for visual effects-you should be able to break the bound particles apart as well, preferably if the force imposed on the particle binding exceeds a certain level. The parameters in the Breakability group define the impact force thresholds. Note: Given the same combination of Breakability settings, sometimes lower applied forces can result in greater apparent breakage than higher forces, due to the way the impact moment disperses through the particles and bindings. Consider, for example, how a high-speed bullet can leave a small hole in a pane of glass, while a slower impact might shatter the entire pane. Circumstances can vary widely, of course, so it's often necessary to experiment with binding settings and those of the applied forces to achieve the desired result. Breakable By Force - When on, the remaining Breakability settings become available and let you specify the conditions under which bindings can be broken. For natural, random-looking breakage, the two most important settings are Max Force and Max Torque. Tip: In most simulations, to make the bindings less breakable you need to increase both Max Force and Max Torque.
Max By Bind Distance - Allows the simulation to take into account the distance between each pair of particles, using it as an additional factor to set up the maximum force values. For example, in a brick wall, the force required to break apart vertically adjacent bricks (in the next higher or lower layer) should be greater than the force required to break apart horizontally adjacent bricks (in the same layer) because there's more surface area, and thus more mortar, between the former than between the latter.
Continuous Adjustment - You can animate the Max Force and Max Torque settings; however, by default the current values of these settings are established as constant values for the force and torque thresholds at the moment a binding is generated. If you want the ability to adjust force and torque threshold values constantly, after bindings have been generated, turn On Continuous Adjustment. This way the force/torque thresholds are constantly adjusted, and if at any given frame the current threshold values fall below the actual force/torque exerted on a binding then the binding is broken.
|
|||||||||||||||
|
|
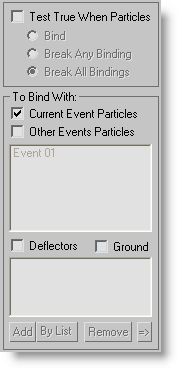
Test True When Particles groupTest True When Particles - When on, PhysX Glue also serves as a test, redirecting particles to the next event based on the particle bindings in the event and which option is active:
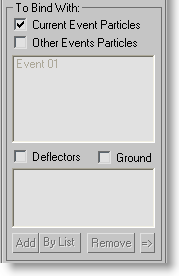
To Bind With groupThe settings in this group let you specify which other simulation entities a particle can bind with. It can be particles in the current event, particles in other events, deflectors, the ground, or any combination thereof. Current Event Particles - When on, particles in the current event can bind with other particles in this event. This is the only To Bind With option that's on by default. Other Events Particles - When on, particles in the current event can bind with particles in other events that are highlighted in the list. For example, if you want particles in this event to bind only with particles in events 03 and 05, turn on Other Events Particles, highlight Event 03 and Event 05 in the list, and turn off all other To Bind With options. Note: For technical reasons, the Other Events Particles list always lists all events, not just events other than the one containing the PhysX Glue test. If you want bindings among particles in the current event as well as particles in other events, turn on Current Event Particles and Other Events Particles, and highlight only the other events in the Other Events Particles list. Deflectors - When on, particles in the current event can bind with any deflector in the list; add deflectors with the Add or By List button. To create a deflector, apply the PFlow Collision Shape (WSM) modifier to a standard mesh object; this object can then interact with particles in the PhysX simulation. Important: For particles to bind to a deflector, the deflector must be a part of any PhysX Collision test in the same PhysX World simulation. Ground - When on, particles in the current event can bind to the ground, as defined by the master PhysX World helper. Thus, the Ground Collision Plane option must be on in the helper's parameters. Note: The Ground option is unavailable when Binding > Type is set to Distance. As a workaround, place a thin box on the ground under the particles, apply the PFlow Collision Shape (WSM) modifier, and specify it as a deflector (see preceding). Add/By List/Remove/=> - Use these buttons to edit the list of deflectors. To populate the list, click Add and then select an object, or click By List to open a selection dialog and choose objects in the list. To remove an object from the list, highlight it and click Remove, and to select an object in the list, showing its parameters on the Modify panel, highlight it and click the => button.
|